
DTBM 4.2
EPI SCIENCES
ETAPE 1
PROBLÉMATIQUE n°1 : ou positionner notre capteur de couleurs pour optimiser le suivi d'une ligne ?
A) Hypothèses :
B) Essais :
C) Conclusion
Il faut mettre le capteur de couleurs à l' avant et à gauche du robot pour qu'il ne tombe dans la rivière. Il faut le mettre à 1 cm du sol à peu près car si il est plus près, il ne capte plus de couleurs et si il est trop loin, ça ne marche pas.
On a testé :
-
A l'arrière du robot (Essai non-validé)
-
Derrière la roue gauche (Essai non- validé)
-
Sur la roue gauche (Essai validé)
-
A côté de la roue gauche (Essai validé)
-
Sur la roue droite (Essai validé)
-
A côté de la roue droite (Essai validé)
-
Sous le robot (Essai non- validé)


ETAPE 2
PROBLÉMATIQUE n°2 : Comment rendre notre futur robot plus maniable et le plus stable possible
A) Hypothèses :
On pense qu'il faut que ce soit un triangle isocèle. Les deux roues doivent êtres écartés de environ 10-15 cm et la bille doit être à 15-20 cm des roues. La brique doit être à environ
3-8 cm du sol
B) Essais :
Cet essai ne fonctionne pas :
le robot a tendance a basculer car
la brique est trop haute.
C) Conclusion
la brique est environ a 2 cm de hauteur




Cet essai ne fonctionne pas :
le robot n'adhère pas au sol car la brique est trop vers l'arrière.
Cet essai fonctionne : le robot ne bascule pas et il adhère bien au sol.
ETAPE 3
Réalisation du prototype de châssis
Contraintes :
- Notre triangle entre les deux roues et la bille forme un triangle isocèle (19cm et 15cm).
- La brique ce situe au milieu des deux roues.
Démarche :
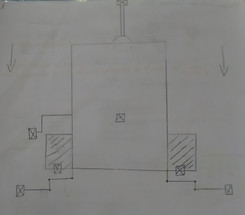
Croquis du prototype de châssis
Début de la création du prototype


Réalisation du prototype en altuglass


SOLUTIONS :
Prototype final


ETAPE 4
Réalisation du châssis
La découpe :
Vérification des mesures

Pendant la découpe

L'usinage :
Préparation

Nous mettons du scotch double face pour pas que le châssis bouge durant l'usinage.
Pendant l'usinage


Logiciel qui permet de voir combien il reste de temps pendant la découpe.
Après l'usinage

Nous aspirons les copeaux de plastique.

Châssis découpé
Montage des capteurs :
Système d'accrochage des capteurs sur les moteurs 1 et 2
Branchement du capteur de couleurs et du capteur ultrasons
.jpg)
.jpg)

Résultat final
.jpg)
Développement d'un programme :
Premier programme

Deuxième programme
